以人工智慧取代人類司機可以挽救數千條生命?至少人們是這樣保證的。 Text by Joe Lindsey Photographs by Jason Henry Translation by Min Kao Edit by Tony Kao 
BarakGila從舊金山卡斯楚街騎自行車到教會區的15分鐘路程不長,但充滿刺激。Gila是位軟體工程師,他知道這段路每天都會充滿車流,有著形形色色的車輛,包含正在進行測試、由Google姐妹公司Waymo及通用汽車子公司Cruise研發的無人駕駛汽車(無人駕駛汽車又稱自駕車,即自動駕駛汽車)。 Gila騎自行車通勤,不介意跟自駕車並排行駛。儘管Waymo及Cruise的自駕車曾發生過數起不良行為,Gila表示他身邊「所有自駕車都以十分安全的方式行駛」。他在2021年五月右轉時發生車禍,撞到他的也不是自駕車,而是人類駕駛的保時捷。肇事駕駛表示車輛的盲點偵測系統並未通知他Gila在附近。Gila能倖免於難,都要歸功他當時保持高度警覺。 對自駕車支持者來說,他們對自駕車的信心源於下列數據:94%的車禍都是人為疏失導致。美國2021年因道路意外死亡的42,939人中,只有很少一部分是行人或自行車騎士,但他們的死亡率比車內乘客還高。除了2020年因疫情剛發生,人們開車頻率降低外,行人及自行車騎士的死亡率已超過十年都呈現上升趨勢。根據美國國家公路交通安全管理局的初步數據,2021年自行車騎士的死亡人數飆升了5%,來到歷史新高,總人數接近1,000人;行人死亡人數也增加了12.5%,來到7,388人,是自1981年來的新高。 然而,自駕車永遠不會因為回簡訊而分心,也不會有酒駕或路怒症,Waymo行為部門的軟體工程師AnneDorsey表示。使用全自動駕駛,能減少人類駕駛的負擔,每年能挽救數千條生命,也能避免無數受傷事件,特別是對於易受傷的用路人來說。 即使如此,自駕車的優勢尚未獲得證實,即使它們確有優勢。過去十年來自駕車的發展停滯不前,這表明,要真正把自駕車推入市場並達到改變人們生活的時間,遠比自駕車行業現在空口保證的還要晚上很多年。同時,汽車大廠推出的先進駕駛輔助系統科技,提供了類似前述保時捷的盲點偵測功能等「輕自駕」功能,但此方法也有疏漏。研究顯示,品牌的一些行銷和科技術語常讓人感到困惑,還誤導了許多人,讓他們將非自駕車當成自駕車使用。 Gila發現,無論是盲點偵測或能在特定情況下運作的自駕系統,都不可能盡善盡美。「駕駛仰賴這些系統,但系統也會出錯。」Gila表示,「這些系統保證能夠完全安全,比什麼都不保證還更糟糕。」 相關規範非常基本,很難辨別哪些功能真的有效,哪些又毫無幫助,讓人合理懷疑一些旨在提升道路安全的功能反倒會造成反效果。同時,在尋找下一代科技解決方案的過程中,我們卻忽略了那些真正能幫助提升當前道路安全的工具,儘管它們較不引人注意。 自駕車的概念最初起源於1950年代。1960年代時,通用汽車和美國無線電公司合作進行了一項實驗,他們設置了測試道路,並在道路表面安裝能控制車子方向及加減速的電路。跟現在一樣,安全在當時是一大賣點,廣告還宣傳:「未來世界中,科技能讓車禍完全消失。」 這個想法在當前為人廣泛接受,程度之甚,連美國國家公路交通安全管理局都表明,自駕車的「主要好處之一就是提升公共安全」。但60年過去了,廣告中的願景仍未成真。 感知能力方面,Waymo及其他公司正在測試的等級四自駕技術已經很大程度上超過人類駕駛。(根據美國汽車工程師協會的定義,等級四又稱「高度自動」,指的是乘客無需操控,汽車即可在有限情況下自動駕駛的情況。要達到完全的自動駕駛需達到等級五,但這基本上只有在科幻電影中才有可能實現。)等級四的車輛配有一系列複雜的感測器,包含高畫質攝影機、麥克風、雷達及一種稱為光達的進階雷射偵測技術。光達能透過感測光源及掃描建構出周遭環境的3D地圖。 運用上述所有功能,每秒鐘可掃描周圍環境數十次的儀器,還能精準捕捉360度的視野,相較起來,人類駕駛的視野則只有約180度。儀器得到所有數據結合後,便能創造出全景的超視野,範圍可達數百英尺,不受光線影響,有時甚至還能穿越固體遮蔽物。 感知能力中,感測器只是冰山一角。自駕車運用的另一項技術是機器學習,後者屬於人工智慧的子集。機器學習仰賴演算法及龐大的圖片資料庫,來「教導」駕駛輔助系統如何正確辨別感測器偵測到的物體及所有變化,像是如何辨識出在滑步車上的孩子或手拿蔬菜的女性是行人,而非家門口的信箱。這些技術的精確程度因資料庫而有所差異。有時在辨別深色人種及身障人士時還可能出現問題。然而,2023年Waymo發表的一部測試影片顯示了自駕車的感知能力有多令人驚豔。在分割畫面中,下方顯示駕駛的視角,上面則是Waymo自駕科技系統Waymo Driver從感測器「看出去的」視角。隨著車輛駛過舊金山市區,行人及自行車騎士在Driver系統中全變成亮黃色的剪影,即使在數個街區外或部分被路邊停車或建築物遮蔽的地方,感測器都能清楚辨識。反觀人類駕駛的表現,連要達到一半都很難。

▲一輛Waymo的無人車在舊金山街道穿梭,旁有行人及自行車騎士。
自駕車的另一個優勢是一致性。「若駕駛每次的反應都一致,對自行車騎士來說會更安全,因為他們就能預測下一步。」Dorsey表示。想像一個需要停車再開的十字路口,有位自行車騎士和駕駛,騎士就算有路權,通常無法預測駕駛是否會禮讓,又或是會直接駛過。但換作自駕車,車輛的反應每次都會保持不變,且不單單是一輛車,所有車子的反應皆會保持一致,因為這些車輛都安裝著相同的軟體,基本上等於是都由同一個駕駛操控,這讓所有車輛都能很安全。Waymo感知部門的機器人軟體工程師ClayKunz表示。測試時,若車輛在遇到行人時無法以安全的方式應對,只要更新軟體,就能改變所有配有同樣作業系統的車輛。「解決一個問題,就等於解決所有車輛的問題。」他表示。 但要在有數十萬種可能情況下做出適當反應,包含判斷其他用路人的行為非常困難。「要應對行人和自行車騎士難度很高,因為他們可能出現在道路上任何一處。」Waymo結構測試部門的前主管Stephanie Villegas表示。系統也無法預測行人或騎士是否會遵守交通規則,他們可能保持在某一車道內,或正在車道的分隔線上,這些差異對於預測他們下一步的行動至關重要。「要完整列出行人及騎士碰到汽車可能發生的情況很困難。」她表示。 要列出所有可能情況,對人類駕駛也是個挑戰,但人類先天就有優勢。「我們擅長使用肢體語言及外在身體手勢來精準預測他人下一步的行為。」維吉尼亞理工大學交通運輸研究院的研究科學家JustinOwens表示。「數百萬年的演化,讓我們天生就有此種能力。」Perceptive Automata是一間自駕車軟體公司,其創辦人兼技術長Sam Anthony2022年時在Substack的貼文指出,從看到行人,到處理大量相關資訊,如對方的年齡、注意力程度甚至是情緒等,駕駛所花的時間不到一秒。 自駕車缺乏這種能力,所以要設定汽車的行為,其中一個方法是透過測試和歸類所有可能的狀況,進行一系列的軟體模擬和實時測試。測試地點包含了離Waymo美國加州山景城總部東邊約120公里的前空軍基地Castle。Waymo不是唯一一間在此測試的自駕車公司,但有著最大的基地,佔地共113英畝。建有一般道路、十字路口、道路號誌及其他一般城市常見的市景,工程師能在可控但真實的場景下進行各種測試,這對所謂的邊角案例有極大的重要性。邊角案例指的是那些極少發生的事件,或因太危險所以無法在公共空間測試的情況,如突然從廂式貨車後衝出來的騎士,或剛好駛過由吹葉機吹起的樹葉中的騎士,因為揚塵可能會干擾感測器。 Waymo及其他公司也在公共道路上進行測試,最著名的例子是舊金山及鳳凰城的部分地區,但是測試時缺乏獨立的監管,且至少一個案例出現了致命的結果。 2018年3月18日早上9點58分,鳳凰城郊區坦佩城的North Mill大道上,一輛隸屬於優步的自駕部門,開啟自駕功能的Volvo XC90SUV正不斷加速向北行駛以進行測試。North Mill大道是一條四線道的主幹道,而在此前,優步車隊已在相同路線上進行了約50,000次測試。 車上的感測器掃描了前方路況,並將掃描來的數據與高畫質的地圖結合,車上的電腦以複雜的演算法來偵測物體、預測情況及行為反應,以計算當下的速度及路線。駕駛座上坐著Rafaela Vasquez,負責監測系統和在自駕系統無法應對時接管車輛。
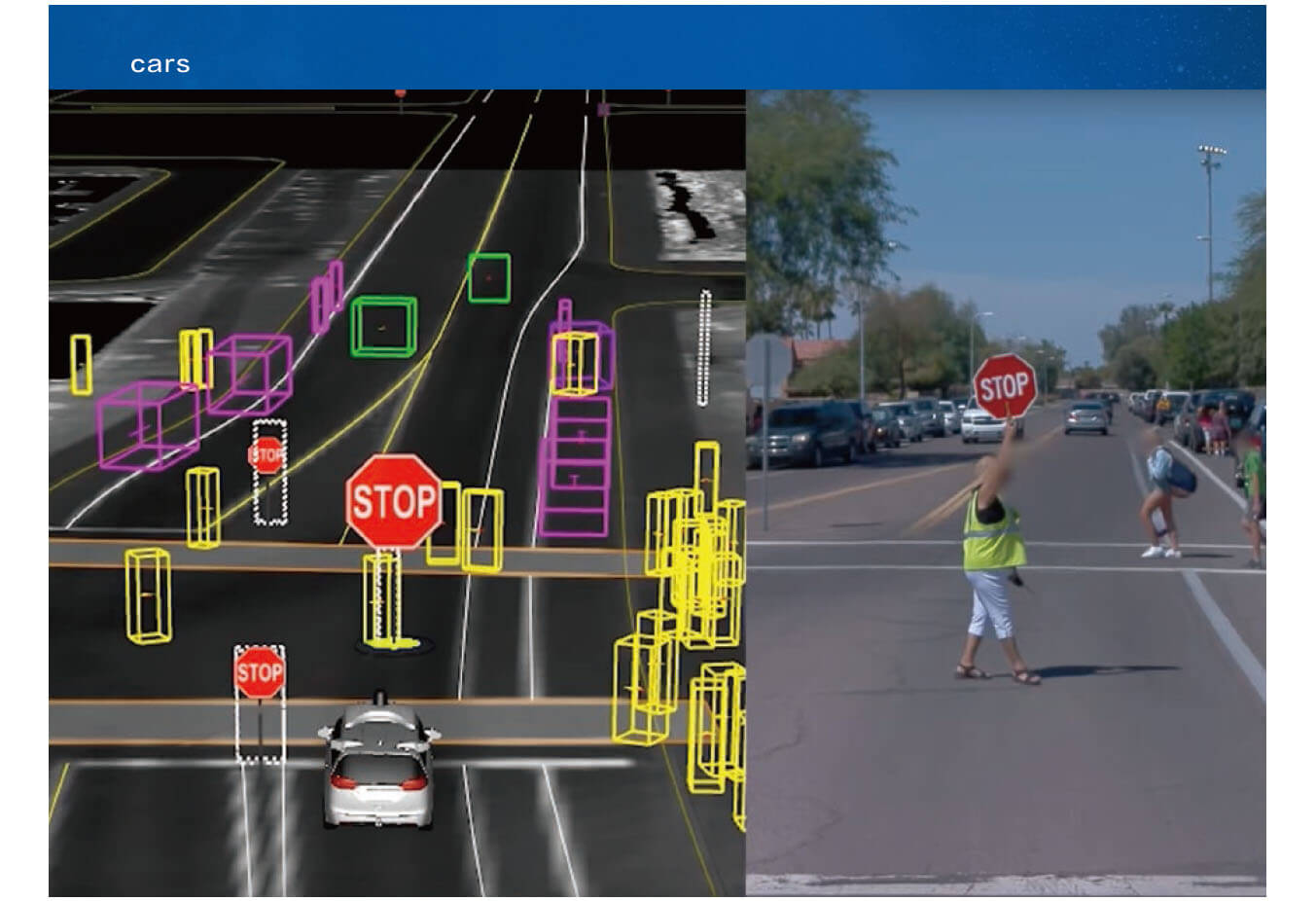
▲分割影片中,一位Waymo車輛的駕駛在學校前斑馬線等待學生通過。多個感測器產出了周圍環境的360度3D街景圖。
道路前方,49歲的Elaine Herzberg牽著腳踏車,穿越過突起的分隔島,走到路上。離最近的斑馬線有數百英呎遠。Herzberg膝下有孫女,且剛買了房子,正要結束在外流浪的生活。 Volvo的感測器在相隔一個足球場的距離就偵測到Herzberg,但在接下來的4.5秒內,系統感到困惑,無法決定要將Herzberg歸類為車輛、自行車,亦或是「其他」。分類系統每改變一次,車輛就要重新計算Herzberg的預期路線及速度,或確定對方其實是靜止狀態,而Vasquez正好在車上滑手機。Herzberg離對面安全的路肩只差幾英呎,但此時車輛以時速45英里逼近。等到優步的軟體認知到可能有相撞風險,也就是事故1.2秒前,基本上已無力可回天,但車輛卻沒有發出任何警告,Vasquez還在滑手機。事故前0.2秒,警報聲終於響起,車輛開始煞車。致命車禍發生前0.02秒,Vasquez才終於握住方向盤,接管車輛。碰撞發生時,車輛時速為39英里。 NorthMill大道為一條筆直的道路,視線不受遮蔽且頭頂照明充足。即使是晚上,如此的意外都可輕易避免。2019年一份由國家安全運輸委員會發表的咎責報告指出優步的數個失職,包含因工程師關閉了車輛的標準緊急煞車系統,因此系統才沒有對自駕軟體進行干預,後者在設計時因為沒有考慮到違規穿越馬路的行人,而無法把Herzberg辨識為行人。 儘管國家安全運輸委員會以長篇大論批評優步「安全文化不足」,卻把肇事可能原因歸咎於Vasquez,因為她分心且沒有監測車輛及周圍狀況。Vasquez也是唯一一位因為Herzberg的死而遭到起訴的人,她在2020年8月被定罪,開庭日期卻一再延後。2023年7月,她對危害他人罪承認有罪,並被判三年的保護管束緩刑。(Vasquez的律師未回應評論請求。)優步與Herzberg的家人另外達成了民事訴訟和解。 至少,Herzberg的死應該要讓國會及聯邦監管機構開始注意到自駕車產業,但「那次案件卻沒有成為應有的警鐘。」國家安全運輸委員會主席Jennifer Homendy表示。(國家安全運輸委員會負責調查事故和提出建議,但無權制定法律或強制法律實施。) 事故後,亞利桑那州勒令暫停了優步的車輛測試許可,優步也自動暫停其他地方的所有測試。2020年,優步自駕部門以前一年市值的55%出售給Aurora Innovation。將近五年過去了,法律面的進展寥寥可數。 針對自駕車在公共道路的測試,聯邦層面無法可管。自2017年開始,國會一直在討論兩項法案,《自駕車起始法案》(暫譯)及《自駕法案》(暫譯),但至今仍未有實質進展。
閱讀完整內容本文摘錄自
自駕車的終極祕密
Esquire君子國際中文版
2024/6月 第226期
相關